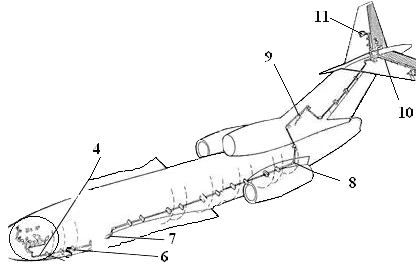
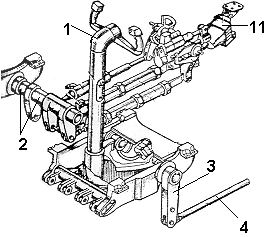
Управление РВ осуществляется с помощью(рис.2.03а
, рис.2.03б
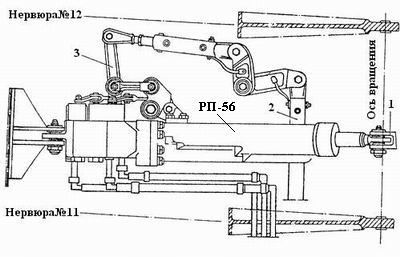
) двух колонок 1, установленных перед сиденьями каждого пилота. Связь между колонками осуществляется карданным валом 2 , расположенным по оси их вращения и связанным с колонками универсальным шарниром. Рычаг 3 левой колонки соединен тягой 4 с нижним плечом коромысловой качалки 5, к верхнему плечу которой присоединена проводка управления в фюзеляже. Проводка управления в фюзеляже проложена под полом пассажирской кабины по левому борту в роликовых направляющих 6. В проводку управления включена коромысловая качалка 7, обеспечивающая компенсацию температурных деформаций проводки. На шпангоуте 67 расположен гермовывод 8, передающий движение проводки в негерметичный отсек фюзеляжа. Далее проводка поднимается вверх и проходит по переднему лонжерону киля. На этом участке в проводку управления через дифференциальную качалку включен рулевой агрегат 9 системы АБСУ. Затем проводка по третьему лонжерону киля поднимается в стабилизатор и разветвляется в обе его половины, подходя к левому и правому рулевым приводам 11. В каждой половине стабилизатора в проводку управления включены пружинные тяги 10, обеспечивающие отклонение одной половины РВ при заклинивании другой или при отказе одного из рулевых приводов.
В системе управления РВ установлены упоры, ограничивающие его углы отклонения. Два упора установлены на узле, расположенном под полом кабины в зоне 8 шпангоута, а два других установлены на переднем лонжероне киля в зоне 5 нервюры.