2.4. Управление элеронами и интерцепторами
Система обеспечивает:
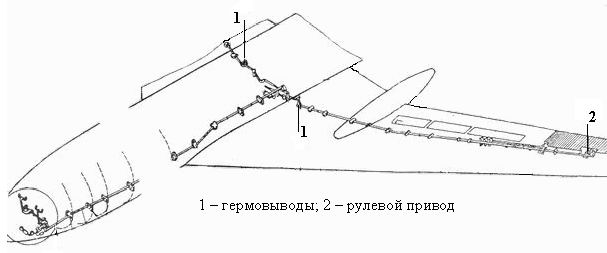
Проводка управления проложена под полом пассажирского салона рядом с проводкой управления рулями (рис.2.06б
).
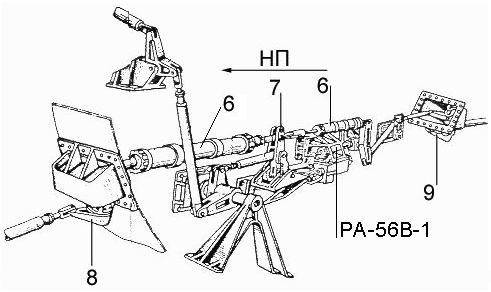
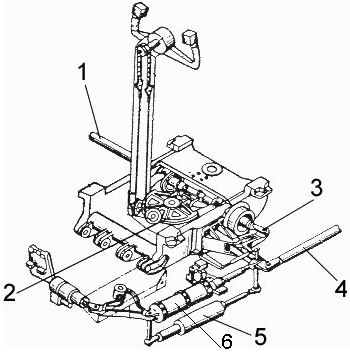
На заднем лонжероне центроплана в проводку управления включены пружинные тяги 6 и через дифференциальную качалку 7 - рулевой агрегат РА-56В-1 (рис.2.06в
).
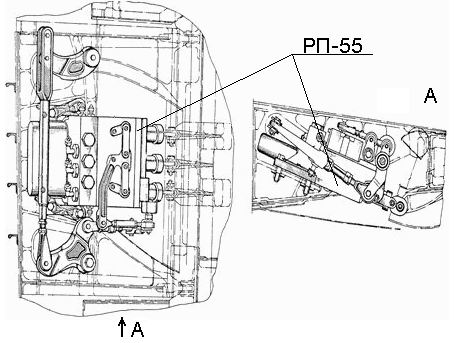
Пружинные тяги обеспечивают отклонение правого или левого элерона в случае заклинивания одного из них. Через гермовыводы 8 и 9 проводка управления выходит из фюзеляжа в крыло и вдоль стенки заднего лонжерона подводится к рулевым приводам 10. Три штока рулевых приводов РП-55 присоединены к кабанчикам элеронов.
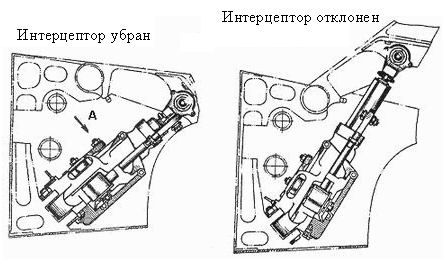
Управление интерцепторами осуществляется с помощью дифференциального механизма, расположенного между нервюрами 33 - 34 и связанного проводкой с элеронами.
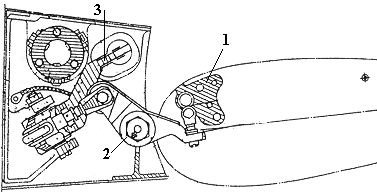
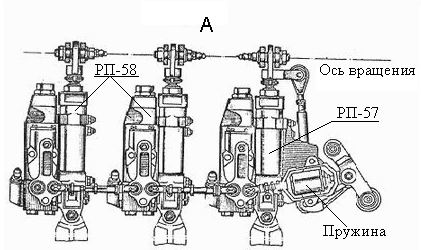
На носке внутреннего торца элерона закреплен стальной упор 1. При отклонении носка элерона вниз ролик упора через качалки 2 и 3 перемещает проводку управления, связывающую качалку 3 с входными звеньями рулевых приводов РП-57 и РП-58, штоки которых присоединены к интерцепторам (рис.2.07а , рис.2.07б ). Отклонение элерона вверх на углы от 1,50 до 200 вызывает пропорциональное отклонение интерцептора вверх на углы от 00 до 450. Одновременно с перемещением проводки управления между элероном и интерцептором происходит обжатие пружины в механизме обратной связи рулевого привода РП-57, за счет которой интерцептор возвращается в исходное положение. Возможность отклонения элерона при заклинивании интерцептора обеспечивается включением в эту проводку пружинной тяги. При отклонении элерона вниз ролики на упоре 1 и на качалке 2 расходятся и интерцептор не отклоняется.
Схема включения рулевого агрегата РА-56В-1 системы АБСУ с помощью дифференциальной качалки полностью аналогична схеме включения этих агрегатов в каналах РВ и РН (см. п.2.4.1).
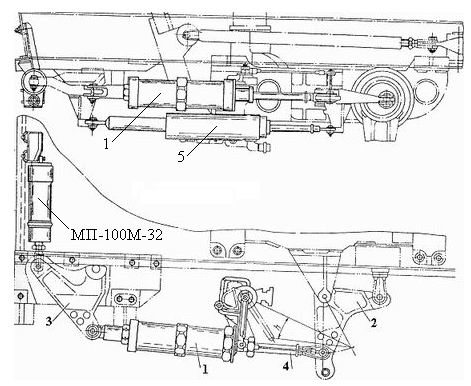
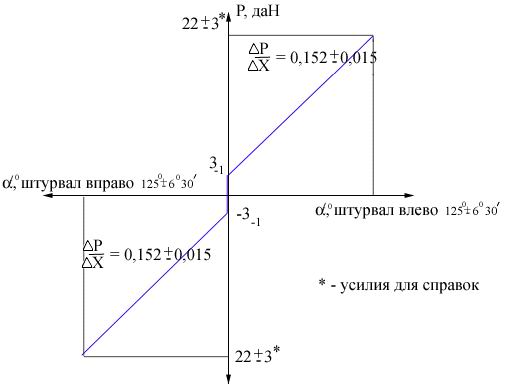
Имитация усилий на штурвалах осуществляется с помощью пружинного загружателя 1, включенного в проводку управления (рис.2.08
). Загружатель установлен между качалками 2 и 3. К малому рычагу качалки 2 подходит тяга от секторной качалки левого штурвала, а ко второму рычагу присоединена проводка управления к элерону. К этому же рычагу крепится тяга 4 загружателя. Шток загружателя через качалку 3 связан с механизмом триммерного эффекта МП-100М-32. Зависимости усилий на штурвале от углов его отклонения показана на графике.
Триммирование усилий обеспечивается в пределах отклонения элеронов на 5,50 вверх и вниз.
Параллельно загружателю в проводку включена следящая тяга, которая служит для отключения автоматической стабилизации крена при отклонении штурвала пилотом.