рис.2.11
2.5.5. Рулевой привод РП-55
Привод РП-55 (рис.2.11)
| рабочая жидкость...................................................масло АМГ-10
номинальное давление в линии подачи....................21 МПа максимальное усилие при работе: трех гидросистем...................................................1500 даН, двух гидросистем...................................................1000 даН, одной гидросистемы..............................................470 даН. |
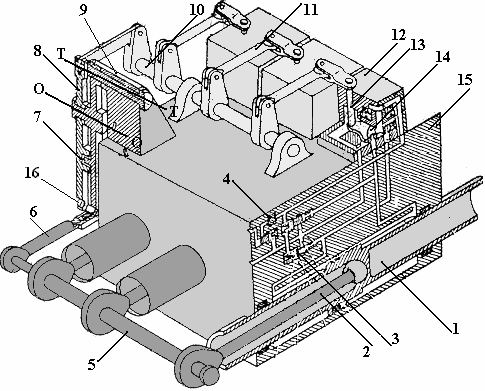
Привод РП-55 является трехкамерным необратимым следящим гидравлическим усилителем с жесткой обратной связью. Питание к приводу подводится одновременно от трех независимых гидросистем, каждая из которых питает только одну камеру. Привод сохраняет работоспособность при отказе одной или двух гидросистем. При заклинивании одного из золотников привод остается работоспособным, так как вал 13 заклинившегося золотника, закручиваясь, не мешает управлению двумя оставшимися золотниками, а полости камеры гидрусилителя заклинившегося золотника закольцовываются.
Привод состоит из трех однокамерных цилиндров, смонтированных в одном блоке 15, из трех распределительных устройств 12, объединенных общим входным звеном 8 - входной качалкой, а также ряда других элементов: перепускных клапанов 3, предохраняющих от заброса давления рабочей жидкости в полостях цилиндра, фильтра 4, вала привода 10 и тяг 11.
В каждом цилиндре имеется шток 1 с поршнем и шатун 2. Шатуны связаны одним общим выходным звеном-осью 5, к которому подсоединена тяга обратной связи 6.
Управляющий сигнал поступает на входную качалку 8. Поворачиваясь относительно неподвижной в начале движения оси О-О, качалка через вал 10 и тяги 11 смещает золотники 14 из нейтрального положения, открывая доступ рабочей жидкости в рабочие полости цилиндров, в результате чего штоки и шатуны начинают перемещаться в сторону движения точки 16, отклоняя элерон и перемещая тягу обратной связи 6. Перемещение тяги 6 поворачивает качалку обратной связи 9 вокруг оси Т-Т, что обеспечивает поворот входной качалки 8 относительно неподвижной в конце движения точки 16 в обратном направлении и перекрытие рабочих окон в золотниках. В конце движения окна полностью перекрываются и качалки 8 и 9 фиксируются. В новом положении оси этих качалок будут также параллельны, как это было и в начале движения. Тем самым обеспечивается слежение выходного звена 5 за перемещениями тяги управления , присоединенной к входной качалке в точке 16.