рис.2.12
2.5.6. Рулевой привод РП-56
Привод РП-56 (рис.2.12, рис. 2.13)

Основные технические данные привода РП-56:
| Рабочая жидкость...................................................масло АМГ-10,
Номинальное давление в линии подачи...............21 МПа, Максимальное развиваемое усилие при работе
|
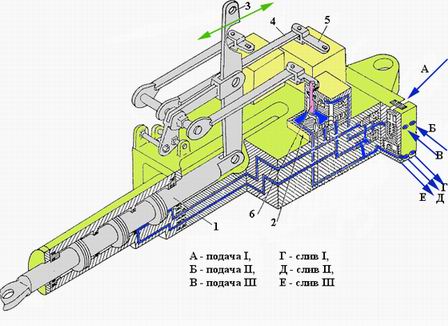
Привод РП-56 трехкамерный необратимый следящий гидроусилитель с жесткой обратной связью. Питание к приводу подводится одновременно от трех независимых гидросистем, каждая из которых питает только одну камеру. Привод сохраняет работоспособность при отказе одной или двух питающих систем и при заклинивании одного из золотников за счет крепления золотников на гибком торсионе.
Рулевой привод состоит из цилиндра, в котором последовательно размещены три камеры, объединенные общим выходным звеном - штоком 1, трех распределительных устройств 2, объединенных общим входным звеном - входной качалкой 3, и других элементов. Шток 1 присоединен к кабанчику руля.
Управляющая тяга подсоединяется ко входной качалке в точке 3.
Управляющий сигнал, поступая на входную качалку 3, поворачивает ее относительно неподвижного в начале движения штока 1 и передает движение через тяги 4 и рычаги 5 на валы золотников 6. Золотники поворачиваются и открывают доступ жидкости в рабочие полости цилиндров, в результате чего шток начинает перемещаться. Шток движется в противоположную по отношению к перемещению управляющей тяги сторону. Перемещение штока передается на руль и на входную качалку 3, которая, поворачиваясь относительно неподвижной в конце движения точки 3, через систему рычагов вращает золотники на закрытие рабочих окон. После перекрытия рабочих окон движение штока прекращается. Таким образом, в процессе работы привода происходит вращение входной качалки 3 относительно ее среднего шарнира, а верхний и нижний ее шарниры движутся в противоположные стороны.